Richard Jones, MD
Southeastern Sports Medicine
Total shoulder arthroplasty (TSA) can be challenging surgery, due to exposure difficulties and limited access to portions of the anatomy. In the past, working your way through a steep learning curve was the only option to achieve success in some of the most difficult shoulder arthroplasty cases. The inability to expose certain portions of the scapula make it nearly impossible using conventional methods to precisely determine version (Friedman’s axis) and inclination of the glenoid intraoperatively, not to mention accurately correct it.
Unfortunately, accurate reproduction of these anatomical parameters are the key ingredients to successful shoulder arthroplasty outcomes. We know that anatomic TSA outcomes are correlated with the quality of reproduction of the patient’s anatomy. During reverse shoulder arthroplasty, position and orientation of the implants can play a role in range of motion, stability, and scapular notching.
Tools that help us with reproduction of the anatomy are ever improving. Today, as shoulder surgeons, we are armed with modern implants allowing modularity to assist reconstruction. Also, the recent popularization of augmented implants further improves our ability to improve glenoid deformity. However, recognition of the deformity and exactly how to correct it using an augment remain some the greatest difficulties in shoulder surgery.
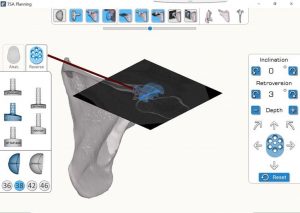
Fortunately, new technology is available to give us modern solutions to these problems. These include sophisticated preoperative planning software, patient-specific instrumentation (PSI), and Computer Assisted Orthopaedic Surgery (CAOS). Preoperative planning allows us to identify deformities, virtually plan reconstruction, and accurately place implants. This alone has been shown to improve the accuracy of implant placement. However, the ability to take that information to the operating room provides the most optimal situation. PSI does this to a limited degree by assisting placement of a K-wire into the glenoid vault. This allows the surgeon to ream in a predetermined version and inclination. Information on reaming depth or screw placement is not possible. Furthermore, if the K-wire becomes loose or displaced the accuracy is lost.
CAOS is well proven in the knee and has shown great promise in the shoulder. Advantages of CAOS in the shoulder include: having complete control of version and inclination with adjustability intra-op, feedback on reaming depth, navigation of screw placement in RTSA, potential navigation of implant placement, and no dependance on K-wires. Also, future applications are possible for the humeral side.
I began using ExactechGPS® computer-assisted surgery for total knee arthroplasty (TKA) approximately two years ago. This has really streamlined my approach to knees and improved my consistency with balancing the knee and subsequently outcomes. It was, therefore, a natural progression to the ExactechGPS Total Shoulder Application. To date, I have performed approximately 35 shoulder cases with ExactechGPS and have learned some things along the way.
First, the registration of points on the glenoid requires a little extra exposure around the coracoid and time to strip off remaining cartilage on the glenoid. However, after a few cases, this only adds around five minutes including attaching the tracker. Speaking of the tracker; early in the development process, there was concern about the stability of the coracoid tracker. I’m happy to say that there has been only one case in which the tracker came loose requiring me to abandon the navigation. One interesting observation I have found since starting navigation has been that my use of augmented implants has increased. Of my initial cases to date, there have only been four non-augmented glenoids placed.
This stresses the point that we may not always be as accurate as we think in recognizing deformity and performing reconstructions of the glenoid in the absence of navigation (or at least I wasn’t).
Aside from improvement in recognizing and correcting deformity, the ExactechGPS Shoulder Application has also made the process of placing augmented implants easier and more efficient. No longer do I need to worry about placing a K-wire down what I think is the center of the vault, use a bulky guide and a second K-wire to ream over for a set amount of version, or try to determine how much I’m correcting with eccentric reaming. Now I just navigate my central starting point and ream based on my preoperative plan. On the following pages, I demonstrate two cases where CAOS helped me identify deformity and perform an accurate reconstruction on the glenoid side during RTSA.
CASE 1
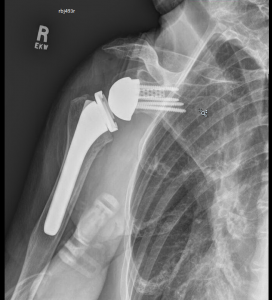
This is a 74-year-old male with history of prior failed cuff repair now with rotator cuff tear arthropathy. There is significant posterior wear of 18 degrees combined with 10 degrees of superior inclination. This is a common wear pattern in rotator cuff tear arthropathy. By planning the posterior superior augment preoperatively I was able to move the center starting point slightly posterior and place it in 6 degrees of retroversion, allowing the cage to stay within the vault and ream almost no bone. The 10 degree superior portion of the augment fit almost perfectly. Without the preoperative planning and the GPS navigation it would have been easy to ream away significant bone anteriorly to attempt a correction of the version. There also would have been no way to determine how much retroversion I was leaving the implant in order to ream minimally.
 |
 |
CASE 2
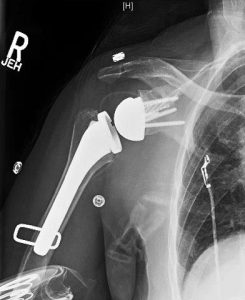
This is a similar case of posterior superior wear, but with a slightly smaller vault. There is 15 to 20 degrees of retroversion and 10 degrees of superior inclination. It should be noted that there is a posterior osteophyte that I didn’t want to use as support for the implant. As in the previous case, the goal is to place the implant while removing as little bone as possible and maintaining as much of the cage as possible in the vault. To avoid reaming the subchondral bone, the posterior superior augment baseplate was used. I undercorrected the version to 8 degrees and moved the center point slightly anterior to avoid the posterior osteophyte. This left the slightly longer cage of the posterior/superior augment barely penetrating the anterior cortex which is of little to no consequence. As in case 1, in the absence of preoperative planning and GPS, finding a proper starting point on the glenoid face to place the implant in the appropriate amount of acceptable retroversion, avoiding the posterior osteophyte, and reaming minimal to no subchondral bone would be extremely difficult.
 |
 |